
Robot de limpieza personalizado Motor DC sin escobillas utilizado para la limpieza de paneles solares, motores BLDC para conducir y cepillar la máquina
-
Resaltar
Motor de seguimiento solar de 120 rpm
,Motor DC sin escobillas para paneles solares
,Motor de seguimiento solar de 120 rpm
-
Garantización3 años
-
Puertociudad de Shanghai
-
En la actualidadPersonalizado
-
Velocidad (RPM)Personalizado
-
EficienciaIE 1
-
Ventilación (V)12v y 24v
-
Potencia de salida50w 100w 200w
-
UtilizaciónAutomóvil, bicicleta eléctrica, abanico, electrodoméstico, máquina, robot
-
El tipoMicromotor
-
Torque de trabajo7Nm personalizado
-
ConstrucciónImán permanente
-
ConmutaciónCon y sin pincel
-
Proteger la característicaA prueba de goteo
-
Lugar de origenChangzhou China
-
Nombre de la marcaSMART AUTOMATION
-
CertificaciónCE
-
Número de modeloProducción de equipos
-
Cantidad de orden mínima50
-
PrecioTo be negotiated
-
Detalles de empaquetadoPara ser negociado
-
Tiempo de entregaPara ser negociado
-
Condiciones de pagoD/A, T/T, L/C, D/P
-
Capacidad de la fuente10000 piezas/piezas por mes
Robot de limpieza personalizado Motor DC sin escobillas utilizado para la limpieza de paneles solares, motores BLDC para conducir y cepillar la máquina




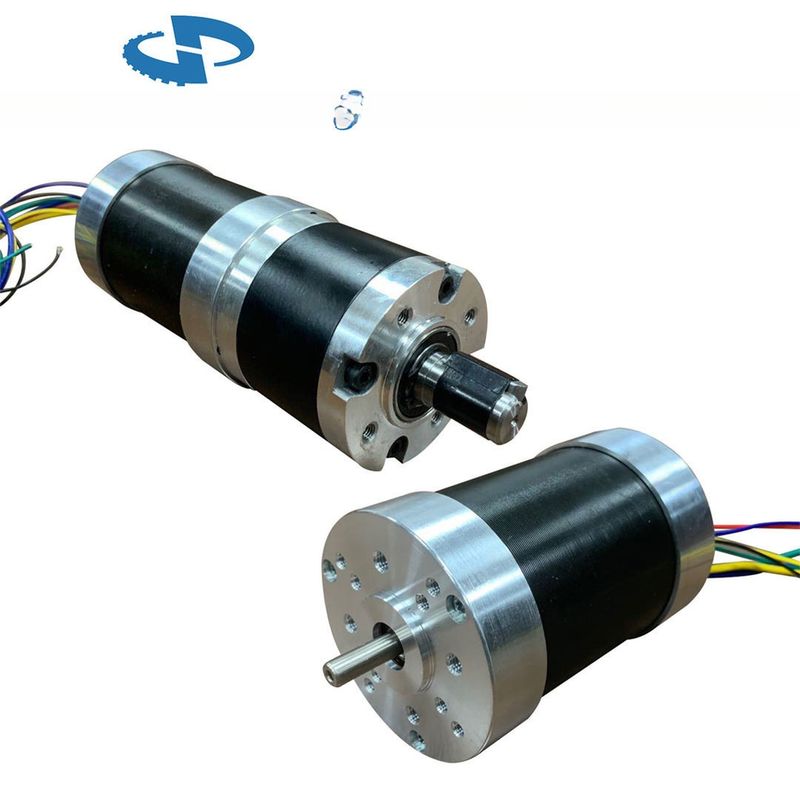


Motor DC sin escobillas utilizado para máquinas robóticas de limpieza de paneles solares, aplicaciones BLDC DRIVE y BRUSH
A continuación sólo se presentan las versiones estándar.
Podemos proporcionar el rendimiento del motor personalizado, eje, montaje...etc.
Conexión eléctrica
| No. El plomo. | Color de plomo | Indicador de plomo | Función | Descripción |
| 1 | El rojo | Se aplicará el procedimiento siguiente: | CCC de riesgo | Tensión de alimentación para sensores de Hall |
| 2 | Negro | El GND | En el caso de los sensores de sala | |
| 3 | Amarillo | Salón A | ||
| 4 | El verde | Salón B | ||
| 5 | El azul | Salón C | ||
| 6 | Amarillo | Se aplican las siguientes condiciones: | Fase U | |
| 7 | El verde | Fase V | ||
| 8 | El azul | Fase W |
Especificación del motor 1:
Especificación del motor de engranajes
Válvulas de corriente continua
Velocidad sin carga 200 ± 10% rpm
Sin corriente de carga <= 1,8 A
Torque nominal de 7,2 Nm
Velocidad nominal 120 ± 10% rpm
Cambio de corriente
Ratio1 / 18
DiciónMenciones

(nota: también está disponible una brida redonda)
Especificación del motor 2:
Especificación del motor de engranajes
Válvulas de corriente continua
Velocidad sin carga 62 ± 10% rpm
Sin corriente de carga <= 1,5 A
Torque nominal de 14,5 Nm
Velocidad nominal 40 ± 10% rpm
Con una potencia nominal de corriente <= 6,5 A
Proporción 1/ 52

(nota: también está disponible una brida redonda)


Nuestros productos se venden en todo el mundo, puede estar seguro de todo el proceso de nuestros productos.